马普科技(福州)有限公司



sales@mputek.com0591-83517896
处理 Survey3 相机图像
Survey3 相机将配备我们希望为大多数客户工作的最佳默认设置,因此您很有可能不需要更改它们。除非您知道自己在做什么并且拥有我们的反射率校准目标,否则不建议调整任何相机照片设置(快门速度、ISO、白平衡等) 。我们已经设置了默认值,因此您不应获得过度曝光的像素值,但这可能会使图像比您习惯的更暗。比正常图像更暗的图像适合处理,因为它减少了像素过度曝光从而丢失像素数据的机会。如果您对调整设置有任何疑问,请随时联系我们寻求帮助,但如有疑问,请使用默认设置。
即使您不打算使用随附的 GPS 接收器对图像进行地理标记,我们也建议您在第一次拿到相机时连接它。开启相机电源并安装 GPS,让 GPS 接收器朝上(与胶粘剂相反的一侧)在室外走动,直到听到 6 声哔哔声,表明相机的 GPS 锁定良好。然后,此锁会将相机上的时间更新为 GPS 时间。如果您不打算使用 GPS 接收器,则可以将其卸下。
定时器触发拍摄之间的时间是相机的间隔设置值加上将图像保存到相机存储卡所需的时间的总和。当我们说JPG模式下最快的抓图时间是1.5s,这个时间包括默认的0.5s间隔设置时间加上大约一秒保存图片。您很少想要增加间隔时间,除非您确实想要捕获更少的图像。1.5 秒也是定时器模式触发的平均时间,因为它会因相机设置、SD 卡内存速度和相机内部进程而异。
为了获得最可靠的触发,我们强烈建议您使用内部定时器,因为使用 PWM 信号可能会由于相机内的许多变量而产生丢失图像的问题。例如,您使用的 SD 卡的型号以及保存图像的速度会影响相机再次准备好拍摄下一张照片的速度。我们销售的存储卡是我们用来确定最快捕获率的存储卡,因此使用速度较慢的存储卡(意味着任何其他品牌或型号的存储卡)可能会触发较慢。触发相机的速度快于保存前一张图像的速度将导致相机未准备好,因此您将错过该新图像。您可以在此处使用页面底部的相机飞行计算器以最快的速度查看必须触发相机才能提供调查所需的重叠。注意底部的“照片间隔”线。
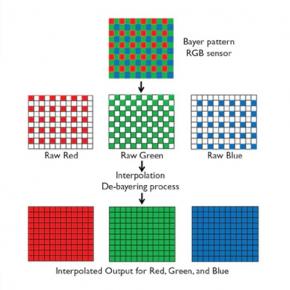
相机将默认仅将图像保存为 JPG。为了在图像中捕捉更大的对比度,并且不应用任何白平衡、压缩和伽玛,我们建议更改为 RAW+JPG 模式。将其设置为RAW+JPG模式,相机保存图像的时间会更长,因此触发之间的时间会更长。如果您的拼接软件需要 JPG(例如 DroneDeploy),在我们的 MAPIR Camera Control (MCC) 应用程序中,您可以轻松地将 RAW 转换为 TIFF 到 JPG。您的图像压缩越少(RAW 越多),它们也就越容易拼接,因此请尽可能使用 TIFF。
调查任务计划基于您的空中平台及其使用的飞行控制器。该视频 展示了如何使用基于 Pixhawk 的无人机和免费的 Android 任务规划应用程序 Tower 来设置任务。
捕获图像后,您可能需要在将它们拼接成 2D 正射镶嵌图像或生成 3D 模型之前对其进行准备,这就是使用我们的MAPIR 相机控制 (MCC)应用程序的地方。
如果您以 RAW+JPG 模式捕获图像,则使用 MCC 的“处理”选项卡将其转换为 TIFF。在处理过程中,包括 GPS 捕获位置(如果使用附带的 GPS 接收器)在内的完整图像元数据将从 JPG 复制到 TIFF。
接下来,您将要使用 MCC 的“校准”选项卡校准图像(对于 RGB 可见光模型不是必需的)。如果您在调查之前捕获了反射率校准目标的图像(推荐),此步骤将要求您提供我们的反射率校准目标的图像,或者如果您没有,您可以使用我们提供的默认反射率值(根据在阳光充足时拍摄的图像创建)。图像将使用代表反射值而不是颜色值的每个像素进行校准,因此如果图像看起来太暗,请不要担心。如果您的正射镶嵌软件不支持 TIFF(例如 DroneDeploy、MapsMadeEasy 等),您也可以选择将 TIFF 文件转换为 JPG。
正射马赛克是单拼接的 2D 地图图像,其中包含在调查期间拍摄的许多单张照片。
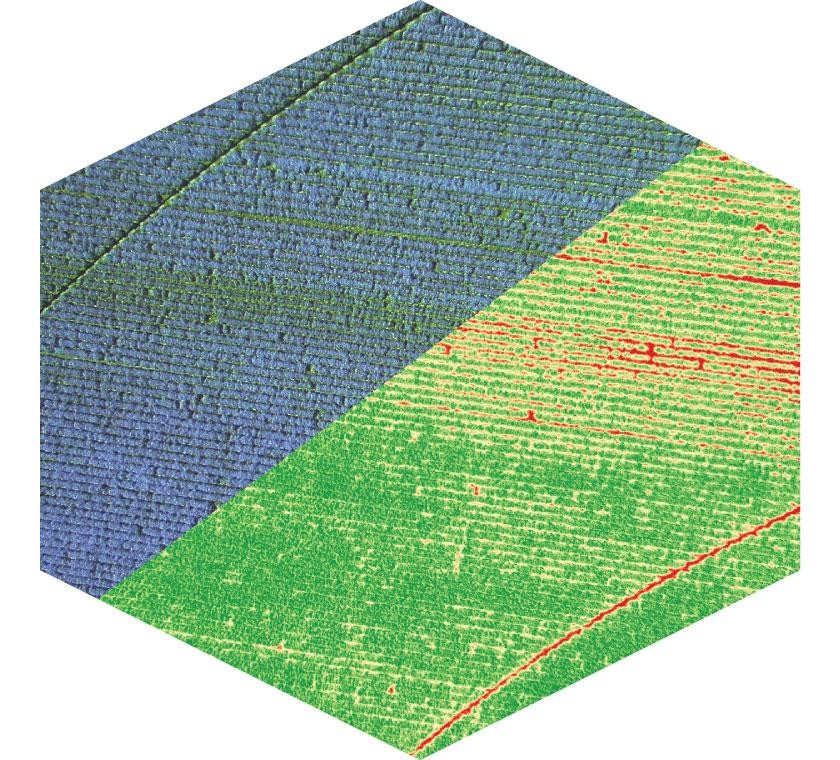
正射马赛克和其他导出的质量将根据用于创建项目导出的软件的功能而有所不同。强烈建议您使用可以使用图像中包含的地理位置 (GPS) 信息的处理软件,以获得最佳效果。组合图像的摄影测量引擎代码可能因软件而异,因此根据调查区域的主题,某些软件的性能可能比其他软件更好。例如,封闭冠层行作物的同质农田更难拼接在一起,因为图像往往看起来相似。
摄影测量程序使用运动结构 (SfM) 方法,通常称为“点云”软件。之所以这样称呼它们,是因为它们创建点的 3D 模型,或匹配像素来生成导出。由于这些程序创建了一个点云,它们还可以输出 .obj、.mtl 和 .jpeg 建模文件,以便在Sketchfab等 3D 模型查看器中使用。
MAPIR Cloud 、Pix4D Cloud 或 DroneDeploy等基于云的应用程序 都要求您将图像上传到其服务器,然后在处理完成时通知您。这些服务的收费方式各不相同,但大多数服务的最低月费约为 100 美元。它们在您从他们的服务中获得的最终结果方面也有所不同,通常更昂贵的“专业”套餐以更高的成本提供更多的输出。这些基于云的服务通常不支持 TIFF 文件,因此请确保在上传之前将任何 RAW 图像转换为 JPG。
可以使用的流行桌面软件包括 Pix4Dmapper、Agisoft Metashape 和 Simactive Correlator3D。
We chat